
Version 2 blind control configuration option to invert blind state
I have installed blind system but needed to have blinds close in the opposite way, ie. curved part of blind facing out and not in, to achieve this I changed the commands open=0 and closed=100 to *****
open=100 and closed=0 (Non Standard)
and half remains the same, all works great but now the roller shutter icon state is reversed, shutter shows open when blind is closed etc, I have seen in other sites an option that reverse state in the configuration file of the device.
Default is blinds swing down to close in this setup.
Blinds have two possible states to close from open position.
Swing down to close (Default) 0=open, 100=closed, this is the standard command set.
SWING DOWN to Close

or
SWING UP to close, (reverse command) , 0=closed, 100=open.
SWING UP to close

this is non standard command and causes inverted feedback states. And is opposite to how Alexa, Google and any other Home Assistant System operates.
I Am using the reverse command method to achieve the swing up to close. This method does work but is messy and can cause some problems and can be confusing to operate. Solution needs to be transparent and easy to use. Less programing modifications in sitemap files etc…
I have downloaded Matt’s V2 Arduino file
Process I am working on.
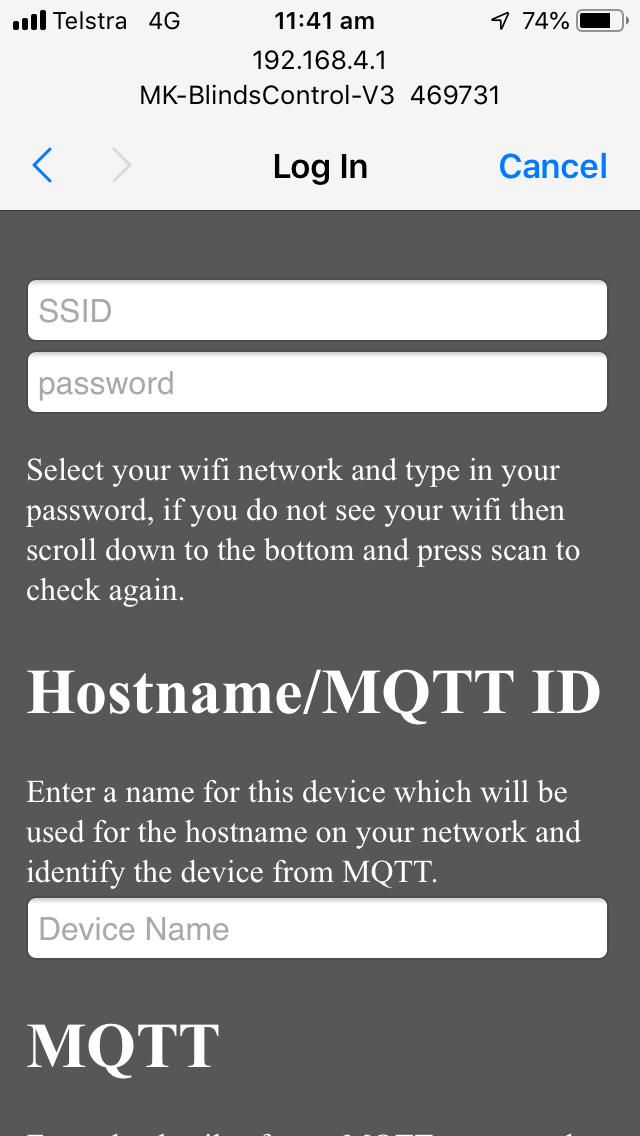
Program each blind individually through the new WiFiManager front end as in V2.
Ability to change swing direction to close from open state. ie swing down or up to close
Allow for left or right side install of servo modification. Default is left.
Allow for Open State Trim adjustment. eg re-adjust 5 degrees on 0 plane) re align via software not mechanical if slightly out
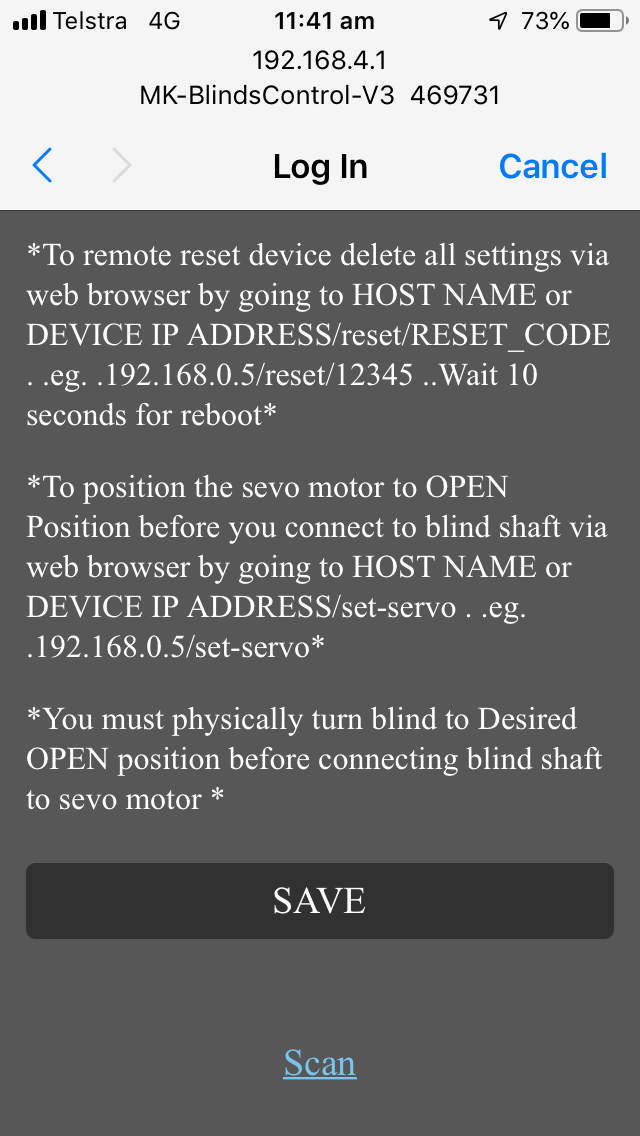
Ability to reset the device via web to force WiFiManager to run setup again.
Over the last few weeks I have learnt a lot about coding but still a beginner but have achieved the following :-
WiFiManager Setup new options
Invert Blinds State (Yes/No) this inverts state sent back to MQTT Server
Invert Blinds command (Yes/No) This inverts command received 0 becomes 100 and 100 becomes 0. use to change swing direction.
Open Trim adjustment (+/- degrees) default is 0, between 0 and 25 degrees
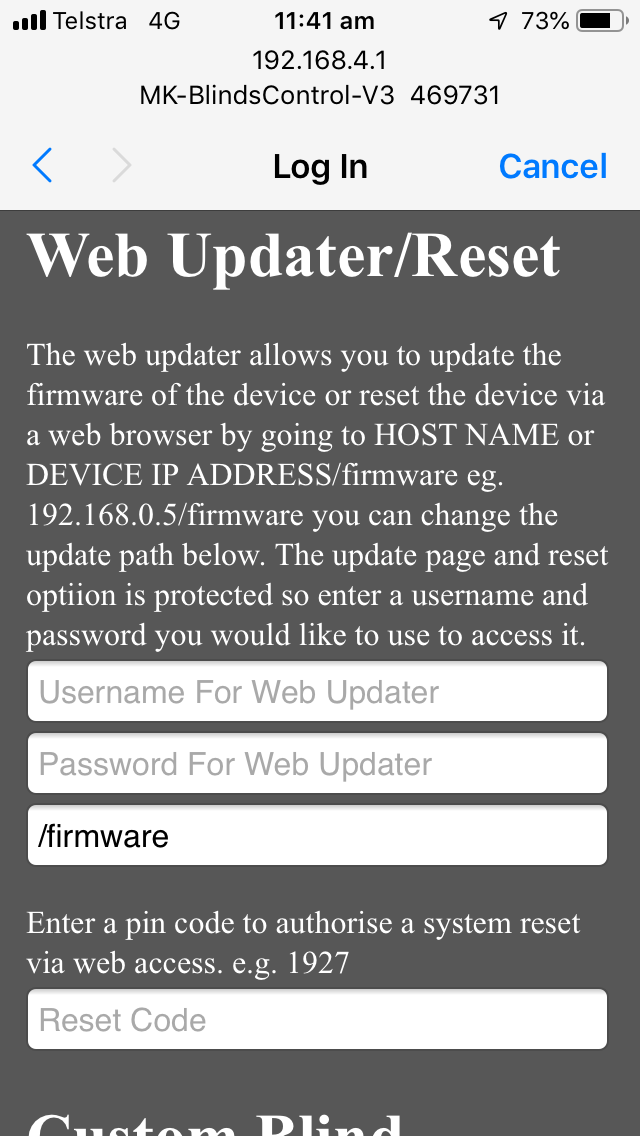
Reset Code (Reset Code Stored In Flash)
Remote reset device settings via web . htpp://DEVICE_IP_ADDRESS/reset/RESET_CODE
htpp user name and password must be entered aswell
e.g. htpp;//192.168.0.10/reset/123456
Using Invert Blinds State and Invert Blinds Commands can achieve changing swing directions and install options either left or right with correct results.
The open Trim Adjustment adjust the blind after reporting its state to MQTT server so not to affect the visual state condition in Openhab.
I am still testing changes for correct operation etc
So far all OK
Once all tested from My side I will forward the code to the Owner Matt, for his testing, approval and then release. Matt will be able to tidy up code etc






 It looks awesome.
It looks awesome.
