It’s funny you should ask. On Monday evening, I was set to chuck the whole thing. I’d even ripped out the servo and gear box and reinstalled the original, manual, tilt mechanism. There were primarily two things frustrating me. First, the blinds would not close as tightly as I wanted. Second, the tilt positioning was difficult to set and would not stay set.
With the original tilt mechanism reinstalled, I was able to get the blinds to close satisfactorily again. Apparently, something had popped out of place slightly in all of the mounting and unmounting. The manual, tilt mechanism was able to apply enough force to pop whatever it was back into place.
The gear box, or technically rather, my blinds were part of the problem of unreliable positioning. The gear box is designed for the the shaft to go completely through the box. That allows it to keep the shaft gear and servo gear sufficiently pressed against each other. It’s not possible to do that with my blinds. Consequently, there was enough play in the shaft gear that it would temporarily lose contact with the servo gear and slip. After that happened, the positioning would be off and remain that way.
After thinking about it overnight, I decided to give direct mounting another try. If it looked like it worked well enough, I would consider cutting the housing to mount it that way permanently. When I did that, lo and behold, the servo fit. I was positive it did not fit when I first got Matt’s kit. The only thing I can think of to explain that is that I tried to fit on the other end of the blinds. Contrary to my earlier belief, the shaft is not truly centered. In fact, it’s off-center just enough that the servo would be offset by about 1/4 to 3/8 inches if flipped over or tried on the other end.
I’m now in the process of refining my own version of Matt’s mount. Matt’s version, even with adequate spacers, twists way too much when the servo experiences resistance. I’m modifying it to fill the interior of the housing so there will be no room to twist. My hopefully last revision is being printed now.
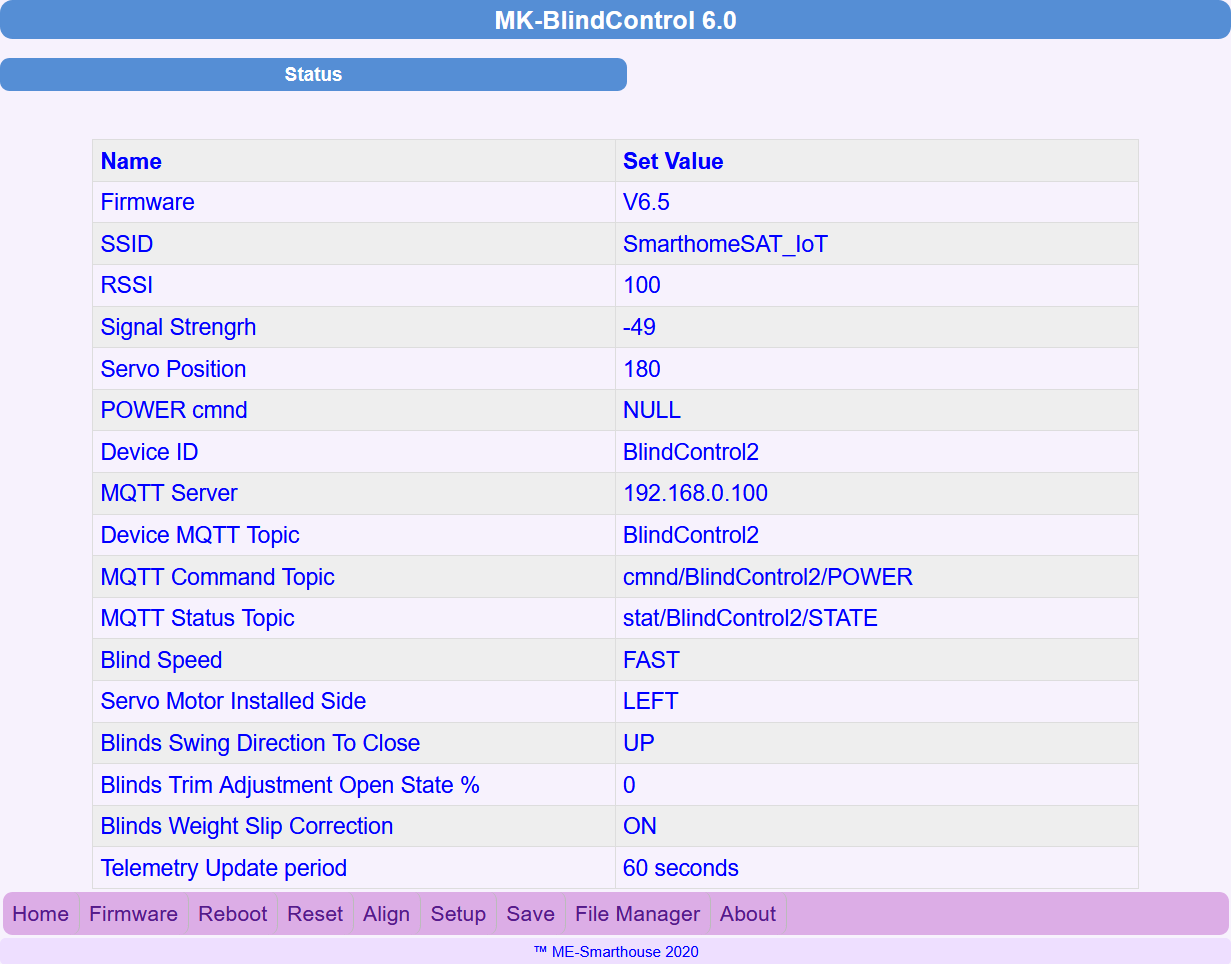
Finely positioning the initial, servo angle to get the open and consequently closed positions just right is still proving to be a tedious process. I am making progress on it though. Your idea of making fine grained adjustments through the web interface would be very useful.
I have some final points regarding the gear ratios. The designer of the gear box provides the STLs for two sets of gears. His original set has a 19t servo gear and a 14t shaft gear. He used that ratio to get full or near-full rotation using a 180-degree servo. His newer set has a 16t servo gear and a 16t shaft gear. He uses that now with a 270-degree servo. I tried both a various times. The 19:14 set was extremely unreliable. I suspect the servo I have isn’t quite powerful enough to run that ratio.