Mk-Blindcontrol firmware is now released.
This new upgrade includes new features;
Auto discovery for Home Assistant with 2 variants. Basic and tilt. needs to be enabled via GUI
Basic discovery for Openhab
The auto discovery injection are basic formats.
Full configuration can still be done via ymal for home assistant and things file/creation for openhab
See the help file for sample things file for openhab
Limit setup for open and closed positions.
Bug fixes and code improvements
BREAKING CHANGES**
After investigating home assistant and learning , home assistant likes to have unique ID’s in the ymal files
the new firmware now generates the unique ID based on the Friendly Name.
Fuzzy Logic now implemented for open and closed states.
the open and closed states are now controlled via fuzzy logic.
open commands are , open , off, and 0.
close commands are close, on, 1 and 100
fuzzy logic will report the state of the blind as 0 for open and 100 for closed, regardless of its actual position.
this is to allow for pre set limits for open and closed positions. if you issue of the above commands to open or close the blind.
If you issue a number between these ranges then blind will move to the position and report as its true position. ie no fuzzy logic
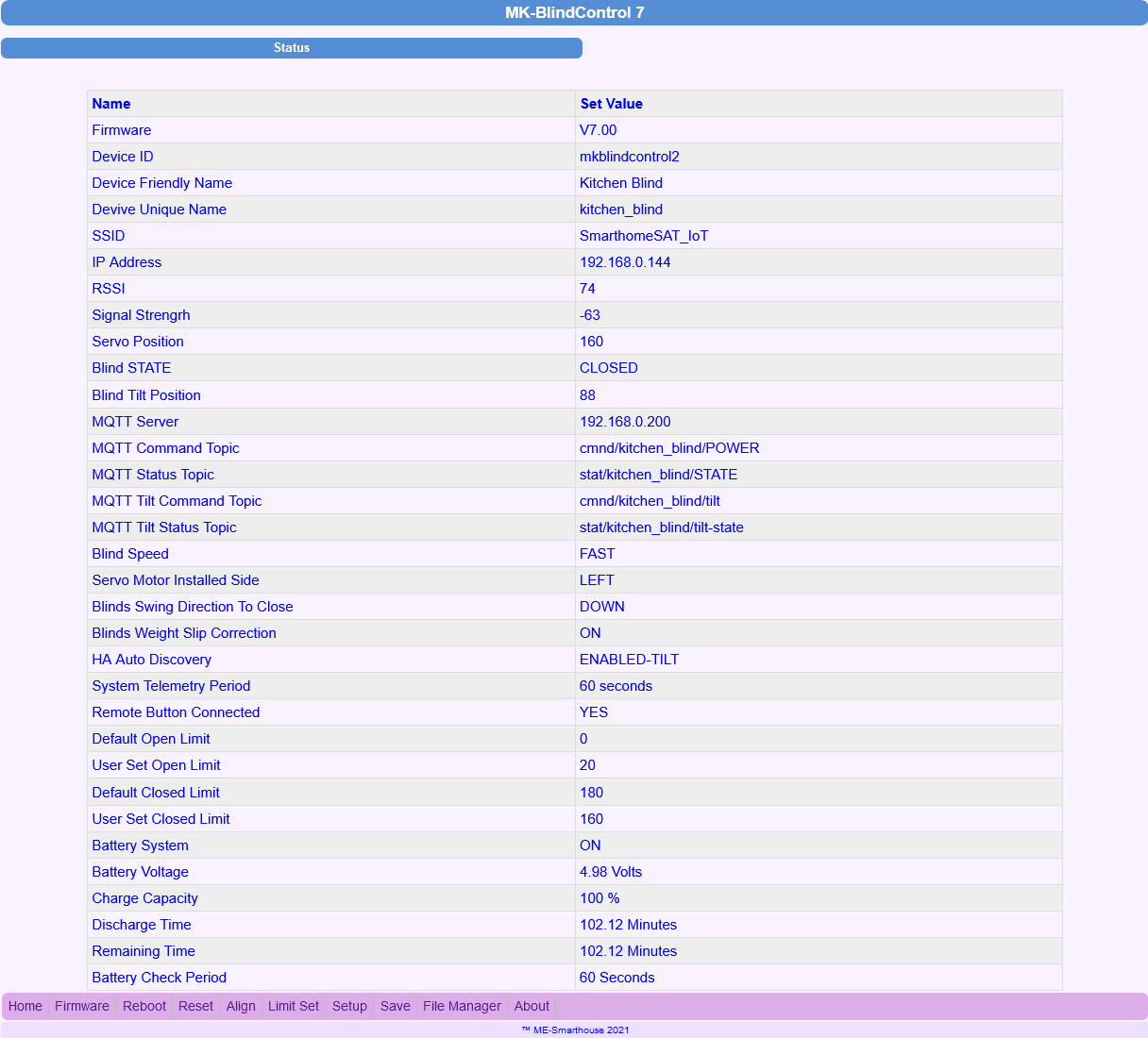
If you need the actual position of the servo motor/blind then it is reported in a new topic
stat/_idintifier/tilt-state.
eg. Friendly Name = Kitchen Blind (Cap and spaces are allowed)
unique ID = kitchen_blind (cap and spaces removed) auto generated
this will now affect your ymal files for command and state topic’s etc
so you will need to edit you ymal file with the unique ID
eg.
command_topic = cmnd/kitchen_blind/POWER
state_topic = stat/kitchen_blind/STATE
availability_topic = tele/kitchen_blind/LWT
You might need to access the GUI and Change the Friendly Name 1st
Also 2 new topics are now available for tilt operations. If you are using the tilt and slider
tilt_command_topic = cmnd/+_identifier+/tilt
tilt_status_topic = stat/+_identifier+/tilt-state
eg
tilt_command_topic = cmnd/kitchen_blind/tilt
tilt_status_topic = stat/kitchen_blind/tilt-state
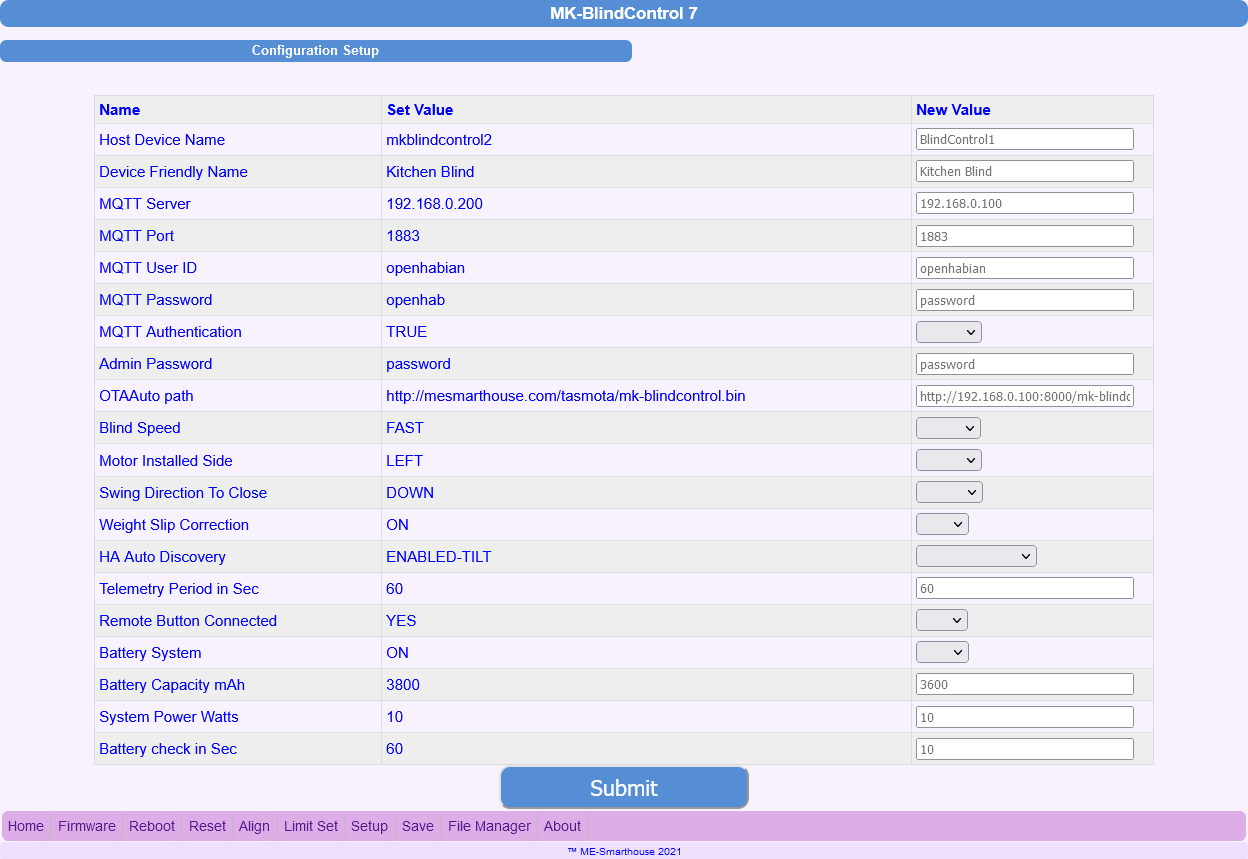
All new settings are now available via the GUI including MQTT topics etc
This upgrade does not require a full re configure just needs the Friendly name set in GUI.
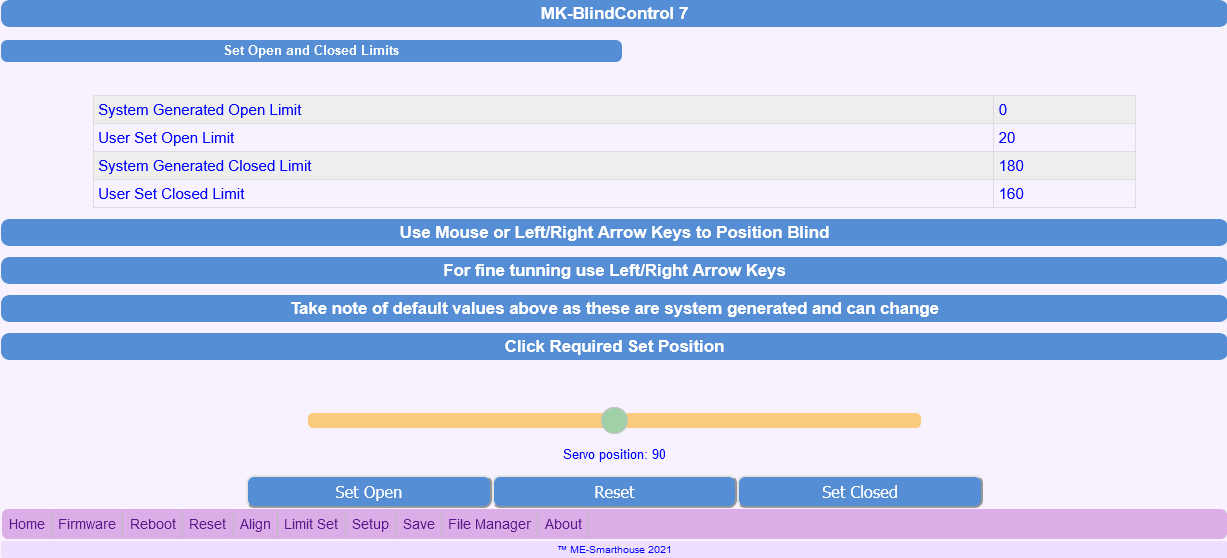
The open and closed default limits are auto generated based on install setup. i.e. swing direction and side motor is installed.
You can now set your desired open and closed limits via the GUI.
Using mouse and slider and arrow keys to move blind to desired position for setup.
Open trim adjustment has been removed with this new setup limits being implemented
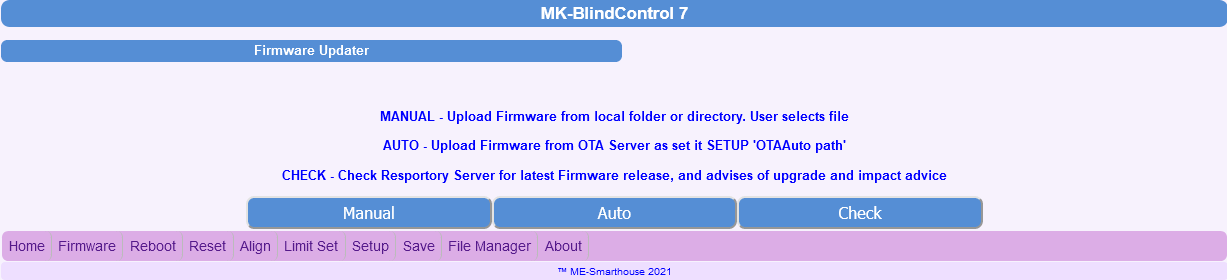
This new firmware is available via the auto upgrade via the GUI if using v6+ or you can download from the repo.
http://mesmarthouse.com/tasmota/mk-blindcontrol.bin
help/about
http://mesmarthouse.com/tasmota/mkblindcontrol.html
Main Menu Status
Firmware Management
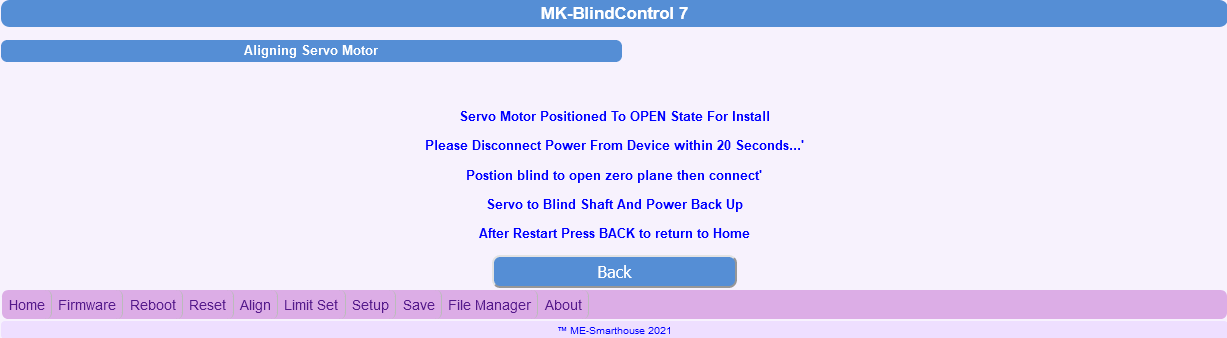
Align
Limit Setup
Setup